3.1 KiB
myCobotROS

注意:
请确保顶部的 Atom 烧入
Atom2.1alpha,底部的 Basic 烧入Transponder。烧录工具的下载地址: https://github.com/elephantrobotics/myCobot/tree/main/Software
该包的测试环境:
ubuntu: 16.04LTS
ros version: 1.12.17
1. 安装
1.1 前提
要使用该包,请确保 python api 已正确安装(已自带)。
如果你仅仅想单独使用 api, 你可以去到这里 https://github.com/elephantrobotics/myCobotROS/blob/main/scripts/pythonAPI/README.md
1.2 Ros 包的下载和安装
将该 ros 包安装到 Catkin 的 src 文件夹中。
$ cd ~/catkin_ws/src
$ git clone https://github.com/elephantrobotics/myCobotROS.git
$ cd ~/catkin_ws
$ catkin_make
1.3 你可以选择测试 Python API
cd ~/catkin_ws/src/myCobotROS
python3 scripts/test.py
2. 模块
2.1 节点
display展示节点。 同步展示 myCobot 的姿态到仿真的模型。control_slider通过滑动条控制 myCobot。control_marker通过可交互的标记控制 myCobot。
2.2 主题
-
joint_states- 控制和记录 myCobot 的状态.Message_type: std_msgs/JointState Data: position[float, float, float, float, float, float]
3. RViz 可视化
3.1 功能
-
可视化 --
display.launch: This function will display robot arm movement in realtime when you manually move mycobot. -
控制 --
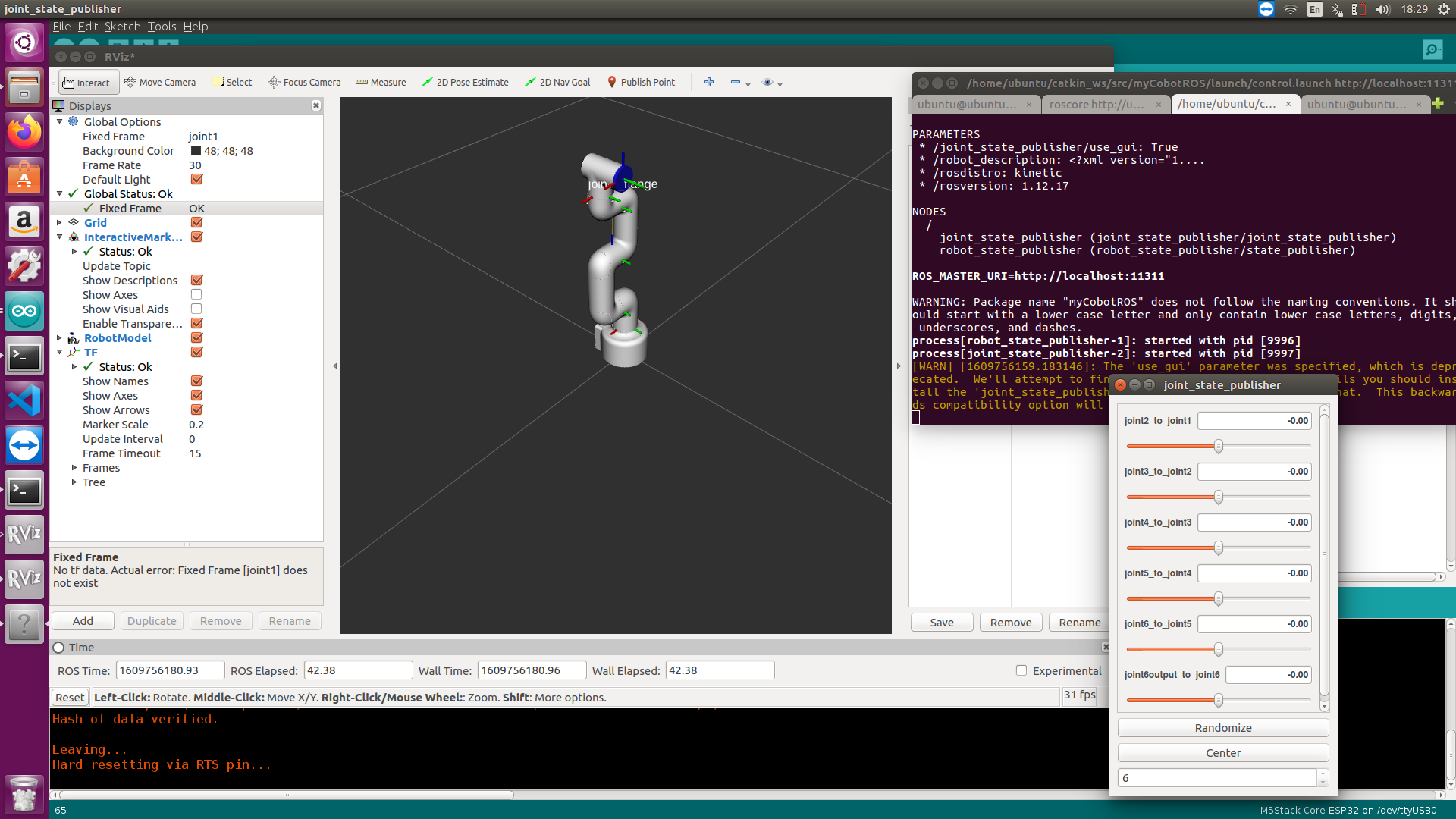
control.launch: This function will allow you use slider bar to control movement of the robot arm.
3.2 启动和运行
-步骤 1: 在 terminal 中打开 roscore
roscore #open another tab
-步骤 2: 启动
a) 如果是展示或者用可交互标记控制, 在第二个 terminal 中运行:
roslaunch myCobotROS mycobot.launch
b) 如果是滑块控制, 在第二个 terminal 中运行:
roslaunch myCobotROS control.launch
-步骤 3: 打开 rviz(第三个 terminal)
rosrun rviz rviz
如果使用上面的命令,你将打开一个空白的 rviz,需要手动添加模块。当然,你也可以使用下面的命令打开 rviz 的同时加载一个保存好的 myCobot 模型。
rosrun rviz rviz -d rospack find myCobotROS/config/mycobot.rviz
-步骤 4: 运行 python 脚本(第四个 terminal)
a) 展示脚本
rosrun myCobotROS display.py
b) 滑块控制脚本
rosrun myCobotROS control_slider.py
c) 可交互标记控制脚本
rosrun myCobotROS control_marker.py
Q & A
Q: error[101]
A: 请确保的你的串口没有被占用,以及 Basic 和 Atom 烧入了正确的固件。